|
摘要-本文介绍了一种名为Gifu Hand II的仿人机器人手,它有一个拇指和四个手指,所有的关节都由内置在手指和手掌中的伺服电机驱动。拇指有四个四自由度关节(DOF);其他手指有四个三自由度关节;手掌附近的两个关节轴在一个点上正交交叉,就像人的手一样。Gifu Hand II可在每个指尖安装六轴力传感器,并可在其表面安装624个检测点的分布式触觉传感器。本文介绍和讨论了Gifu Hand II的设计概念和规格、触觉传感器的基本特性以及抓取物体时的压力分布。我们的研究结果表明,Gifu Hand II有很高的潜力执行灵巧的物体操作,如人类的手。
触觉握力和压力传感
GRIP™系统测量和评估抓取物体的静态和动态压力。握力测量人的手和手指握持应用的界面压力,以评估舒适性、设计和人体工程学。该系统用于改进设计更符合人体工程学的产品,研究腕管和重复运动综合征,或分析人体对各种工具和运动设备的掌握情况。它是收集重要信息和洞察的理想工具,可以增强产品设计、制造、质量和研究。
主要特点
用于蝙蝠握力评估的握力无线
用于蝙蝠握力评估的握力无线
左右手同时测量
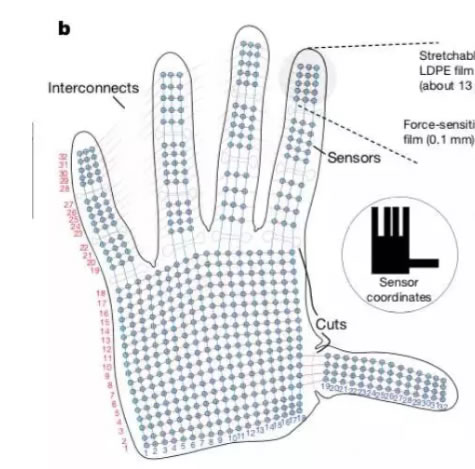
许多独立的传感元件用于压力点的局部检测
一旦手被插入仪器,一个受试者可以用多种方式抓住多个物体。
高扫描率高达750赫兹(栓系版本)
纸薄传感器的形状允许手部运动的全范围
一刀切
耐用、可重复使用的传感器 |





