|
横向表面速度的光子多普勒测速测量
C、 R.Johnson,1a)J.W.LaJeunesse,1 P.A.Sable,1 A.Dawson,1 A.Hatzenbihler,1
和J.P.Borg1
1美国威斯康星州密尔沃基市马奎特大学机械工程系,邮编:53233
(收到XXXXX;接受XXXXX;在线发布XXXXX)(此处显示的日期由编辑办公室提供)
这项工作的目的是开发一种利用光子多普勒进行横向表面速度测量的技术
测速(PDV)。这项任务是通过以相对于
法向轴,其中测得的速度代表横向速度的一个分量。因为表面
特性对光散射有内在影响,探索了不同的表面制备方法以直接反射率,
包括:通过砂纸进行扩散,或通过涂敷微球、铣削v形切口来增加逆反射率,以及
电化学蚀刻凹槽。一项以直径为30 mm的铝制圆盘为特征的实验是
安装在电动手动工具中,用于产生横向速度。一个PDV准直器沿着
圆盘在不同角度的旋转轴,解析视横向速度。为了表征表面处理
回水和速度记录为探头角度的函数,从表面法线的0度到51度不等
准备抛光和电化学蚀刻表面无法提供足够的反射光来解决拍频问题,
然而,砂纸表面、反光微球和铣削v形切口为入射提供了充足的反射光
角度高达51度。然后研究了表面处理在气枪实验中的应用。反光材料
在平面碰撞实验中研究了微球,在斜碰撞实验中对铣削v形切口进行了研究。A.
在斜碰撞实验中,解决了颗粒速度的法向和横向分布问题。
一、 简介
光子多普勒测速(PDV)是一种稳健的
廉价技术,用于制造各种
表面或颗粒速度测量1-3操作
本质上作为迈克尔逊干涉仪,PDV利用了
关于多普勒效应,红外中的相关频移
光到材料运动4
.
鉴于类似方法,如VISAR或
Fabry-Pérot既昂贵又难以安装
分析表明,PDV以其成本适中、简单明了而著称
实现,并平滑地减少数据。这些特征
可归因于与光纤重叠
光学/通信行业,推动组件
更广泛的可用性。事实上,与VISAR和
Fabry-Pérot表明PDV具有类似的性能
特征,包括高时间分辨率(െ
݊ݏ,(ܿ݁)以及小幅度的高功能
光照强度(<-50 dBm)。
PDV的应用主要见于休克
冲击波纵向速度测量的物理研究
然而,PDV可以扩展到任何动态
系统文献表明,许多不同的系统
已经为各种
功能。Marquette的PDV就是一个例子
外差PDV系统,使用两个光源
不同波长以创建差分拍频率。
在这种系统中,光被传输到表面,
反射,并与单独的光源组合。如果
运动存在于入射面上
透射光的频率出现,可以是
在结果信号中观察到。
利用PDV的一个常见实验是单轴
平面应变实验,也称为飞板冲击
实验这个练习用一个扁平的弹丸加速
圆盘(飞片)进入目标,发出纵波
到目标材料中。对齐光纤准直器
垂直于目标的下射程表面
纵波的到达,测量粒子
入射面速度。
尽管PDV传统上用于
纵向速度测量,最近的研究5,6有
显示准直器以已知角度相对于
法向量可以测量“视速度”或
准直器所沿的表面速度分量
与表面对齐(对应于
准直器与表面的入射)。这样的
测量与压力剪切特别相关
(斜撞击)实验。在这些试验中
一个倾斜的鼻片发射到一个类似的目标上
倾向碰撞后,纵向(正常)和剪力
(横向)波传入目标。合并后的
然后根据正常值确定目标中的加载状态
粒子速度的横向分量
在fre观察到在目标的自由表面观察到。本工作重点
开发使用PDV的诊断技术
a) 电子邮件:christopher.r.johnson@marquette.edu
同时测量垂直和横向
表面速度分量。
一、 背景与理论
PDV系统利用
两个光源来确定给定的速度
表面一个光源(目标光)被传输到
表面,捕获,与第二个光源混合
(参考光),并用光学探测器进行观察。这个
目标光和参考光的叠加导致
差拍频率5,7,݂, 这降低了
从单个光(1015 Hz)到可测量的
光学探测器的范围(106
-109
赫兹)。传统上,a
拍频波形数字化,数据
使用傅里叶变换在时间-频率空间中减少。
如果表面出现运动,频率的变化
可以在傅里叶变换中注意到。贸易的
PlotData和SIHREN等软件
用于减少和处理此类波形数据
PDV信号。这项工作使用了PlotData
Sandia国家实验室。软件过程
使用短时傅里叶变换(STFT)的波形数据,
产生一个时间分辨的频率偏移
通过方程式1与速度相关,式中ݒ∗是显而易见的
探针观测到的速度,݂ 是拍频,݂ 是
如果系统为外差,则为初始拍频(݂ ൌ 0
否则),和ߣ௦ 是发送到的激光的波长
目标表面(通常为1550nm)。
视速度可以分解为三个
基于选定坐标系的组件。他们是
正常情况,ݒറே , 横向,ݒറ் , 然后离开飞机റா ,
组件。如果探头与横向平行对齐
但是,平面外组件可以是
如图2所示忽略
需要探针来解耦法向和横向
视速度分量。许多案例都很有特色
图2中展示了不同光学元件的探针配置
路径,并具有相关的照明方向,ݏ、̂和
观察方向,ݎ,̂与每个探头相关。方程式2
描述了速度和方向性之间的关系
光学路径的。方程式2的一般表达式为
然后在方程式3中说明,其中߶和ߠ代表极性
每个探头相对于表面的倾斜角度
法线、ߛ和߮代表方位角
每个探头的角度。角度ߛ和߮偏离平面
讨论过的实验,通常设计得非常接近
目标制造尽可能将其归零。通过观察
准直器在入射角处的视速度,
ߠ്0,以及平行光管垂直于
表面,߶ൌ 0,横向速度可根据
方程3使用离轴探针的视速度,
垂直探头的纵向速度。
்ݒ ൌ∗ ݒ
ሻߠ݊݅ݏ ߶݊݅ݏሺ 2.
ேݒ
2.ሺܿݏܿ ߶ߠݏሻ
ாݒ
ሻ݅݊߮ݏ ߛ݊݅ݏሺ 2.
ሺ3.ሻ
然而,存在选择发病率的规定
探头的角度。如果入射角太小
横向速度分量可能很难解析。
或者,如果角度较大,则收集足够的
用光进行测量可能是一个挑战。
当
进行视速度测量,并表示一个
这项工作所面临的挑战。
探头的倾斜角度也取决于
系统建设。可能的探针配置可以是
如图2所示。图2a所示的一种方法使用两个独立的
用于传输和捕获光线的探头。在这种方法中,一个
探针用于沿路径、ݏ、̂和一个探针传输光
用于沿反射路径捕获光
在这种情况下,用于捕捉光线的探针的角度通常为
接近镜面反射角。
图2b显示了这种布局的变化,
接收探头的角度远离镜面反射
反射角。要解决改进的信号,两个
可以采取措施。可以放置衍射光栅
在入射面上传输高亮度的光
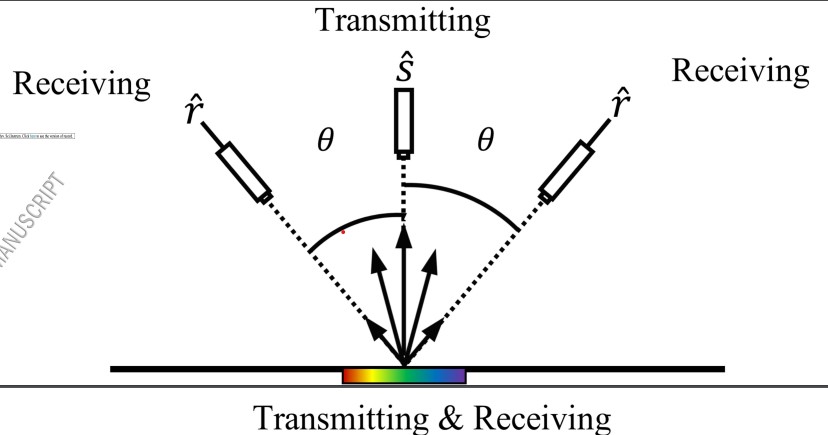
图1:
马奎特大学
外差PDV系统,
其中,传输
探针入射到
目标倾斜,
θ.
ݒ ∗ൌ 1.
2.ሺ݂ െ ݂ሻߣ௦ ሺ1.ሻ
̂ݏ െ̂ݎ൬ ∙ റݒ ൌ∗ ݒ
2.൰ ሺ2.ሻ
模态反射率8
,或漫反射曲面可以
以漫反射方式制造散射光
观测强度6
两种安排都允许多重
放置在不同倾角的接收探头
相对于曲面。总的来说,每种方法都有其优点和
缺点,漫反射表面制备可能需要
信号放大,但实现简单,而
光栅具有良好的回光性能,但需要精确的
对齐
第三次接近是使用一个探头同时传输
并沿平行但相反方向收集反射光
方向,见图2c。这种方法的优点是
使用更少的探针,传统外差PDV
排列,并且需要最少的对齐。依靠
在所使用的反射器上,所有反射器的光返回都不一致
入射角,本研究的目的之一是评估
此功能。
这项工作侧重于第三种技术,测试
增加光照的各种预制表面处理
回来表面处理有两种方式之一;漫射
反射器或回复反射面。潜在的想法
在漫反射镜后面可以归因于表面
不规则,而回复反射器的基本概念是
提供一条路径,镜面反射的角度通过该路径
反射总和为90度。图2c显示了其中的两个
这种反光表面处理。一种方法是
通过将透明球体放置在目标曲面上
镜面反射光进行多次反射,而
另一种方法是在目标的
表面,反射回光源。
二、方法论
进行了一系列实验
系统地确定最佳反射技术
用于使用PDV测量横向表面速度。
第一组研究了光返回与入射的关系
各种反射器的角度。接下来是一个台式实验
用于确定表面处理是否可以
用于测量视速度。最后,忠诚度
选定的表面处理技术在
动态冲击试验。
对于光返回实验,所有目标最初都是
通过端面铣削矩形金属块制成。每个
靶材的平均表面粗糙度Ra为1.867μmേ
0.005ߤ݉平行于晶粒,通过
轮廓仪(Mahr Federal Pocket Surf 3)。表面
粗糙度Ra定义为
外形高度偏差的绝对值
平均线9
。一旦抛光,目标表面准备好
具有以下反射技术之一:漫反射
表面(砂纸或地面),反光
微球、铣削v形切口或电化学蚀刻。
然后使用扫描电子成像表面
显微镜(SEM)。
带有砂纸或地面的目标
使用以下方法制作。砂纸
表面用91%异丙醇和
240、80或40砂纸。异丙醇是
用于防止新暴露的金属生锈。二者都
进行砂磨和研磨操作
由此产生的凹槽在1以内彼此平行
度手工打磨时,砂纸固定在
实心平面,确保压力分布均匀。
对躺着的目标背部施加轻微压力
面朝下放在砂纸上约300次,
或者直到原始表面没有残留痕迹。
使用导向装置确保产生的凹槽
平行的地面是用液压机制造的
平面磨床。表面处理完成后
测量了粗糙度,并记录在表中
一、 测量表明平均表面粗糙度Ra,
用于沙地和地面目标。垂线的表示
并平行描绘粗糙度平均值
制造的凹槽的方向。
a) ●●●●。
b) ●●●●。
c) ●●●●。
图2横向速度测量的探头配置。a)
非透射式探头接收来自透射式探头的反射光
探查b) 两个非透射探头接收来自
发射探头。c) 单个探头使用
反光技术。
图3干式靶材表面的自上而下SEM图像
地面凹槽。
通过以下方法制备逆反射微球靶
在其中一个
一层微球后的平面。
然后立即压缩微球
用一个单独的平面应用。当时环氧树脂
让其固化,然后倒掉多余的球体。
这些实验中使用的微球具有高指数
折射玻璃微球(Cole Safety Products)
直径在35之间米-45m或180米-
600m、 结果分布在410-460之间
较小球体为每平方毫米球体,18
-较大球体每平方毫米22个球体;看见
表二和图4。考虑到这种分布,估计
大约有108.6和5.2个球体在光斑内
对于较小的和
更大的微球。激光光斑大小为
通过蚀刻校准表面和测量确定
光斑直径。
V形切割是通过在靶材上铣削凹槽来准备的
使用90度双角刀具(KEO No。
72820). 凹槽被切割成 |